

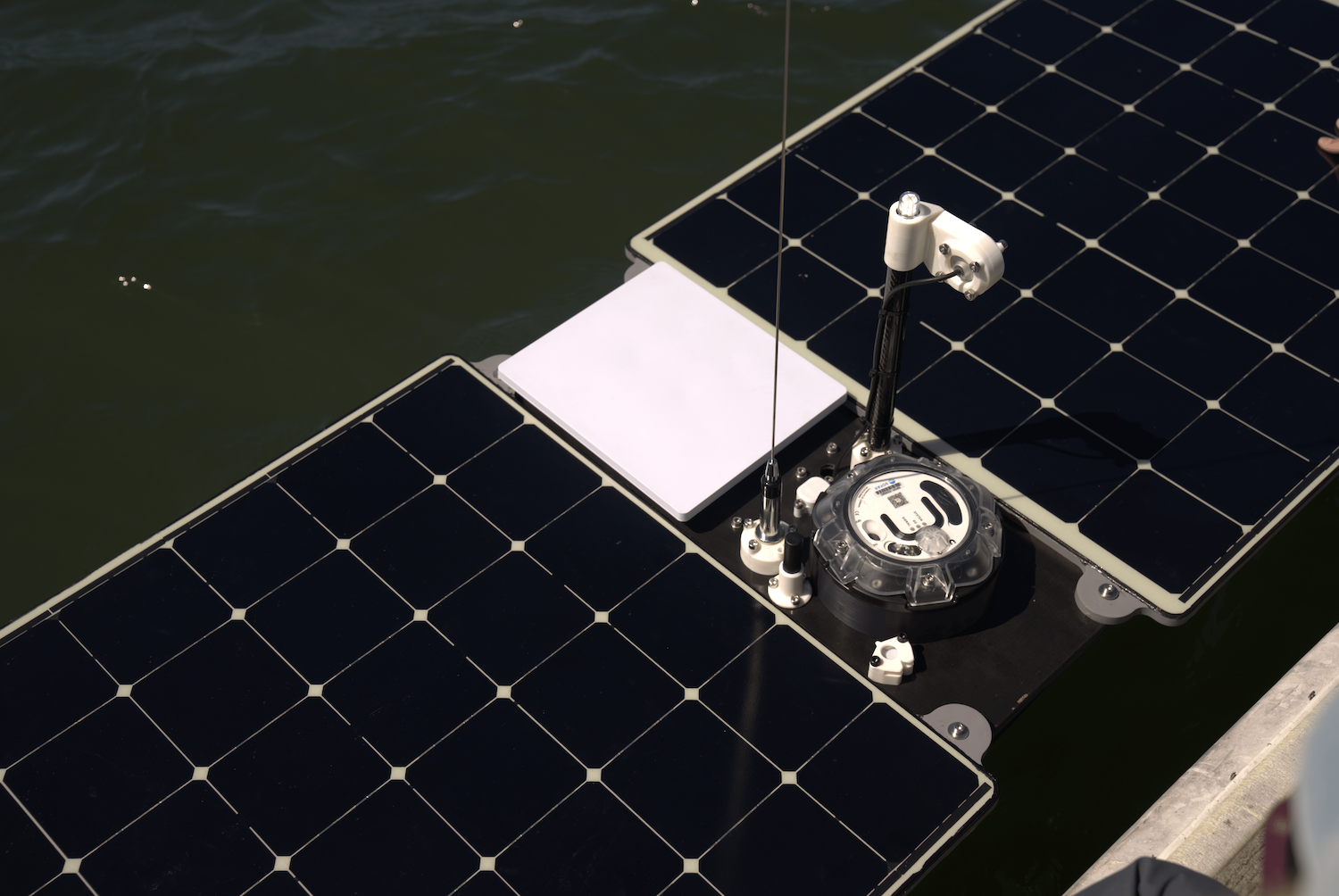
A few weeks ago, we introduced Spotter Scout (now in beta): the mobile version of the Spotter platform, a solar-powered uncrewed surface vehicle (USV) that brings trusted Spotter sensing to locations where moorings aren't practical. That post explained what Scout is and how it fits into the broader Spotter platform. This one goes a level deeper: how the vehicle is actually built, and the engineering choices that make months of unattended offshore operation possible.
Spotter Scout was designed and manufactured by Online Oceans, a UK-based marine robotics company whose naval architects have contributed to more than 80 RNLI lifeboat designs. Sofar integrated Spotter's sensing, data, and platform layer into the vehicle, which returns data to the same Spotter Dashboard and API that Spotter buoy customers already use. What follows is a closer look at how those two halves come together, and the design philosophy behind every layer of the system.
.png)
The single most consequential decision in Spotter Scout's design is also the most counterintuitive: the hull is open to the ocean. Most small vessels are built around sealed compartments that keep water out. The problem with sealed compartments is what happens when they fail. Once a hull is breached, the air volume that was providing buoyancy is gone, and the vessel sinks. For an unattended vehicle spending months offshore, that's a failure mode you can't recover from.
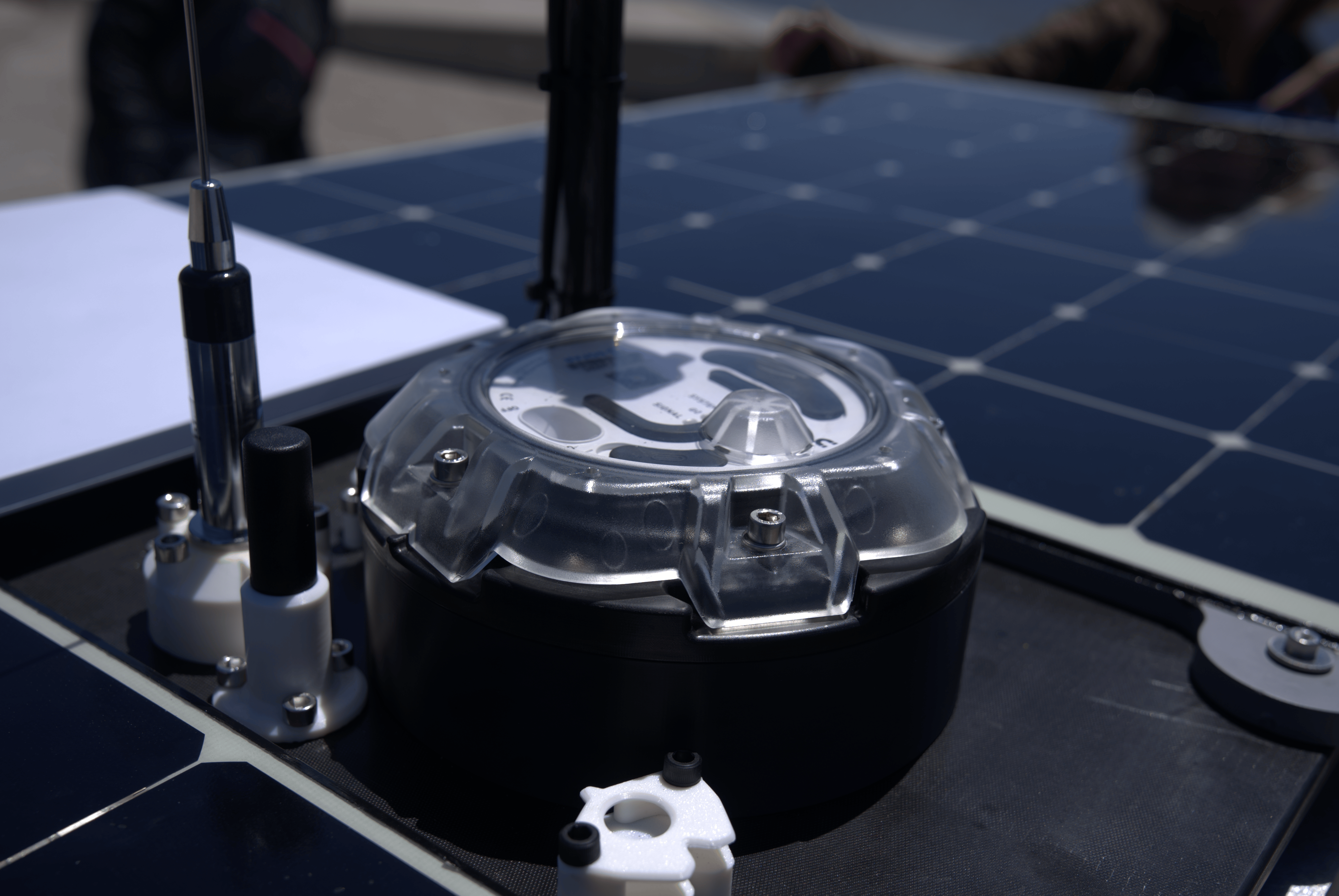
Scout takes the opposite approach. Water enters the hull and drains from it freely, so there is no sealed air volume to lose. Only two compartments are sealed: the core Spotter sensing module and Online Oceans' control electronics, each in its own waterproof enclosure. A breach anywhere else in the vehicle doesn't compromise buoyancy or operations.

The 2 kWh battery sits at the lowest point of the keel inside a waterproof tube. It powers the vehicle and acts as ballast. Concentrating mass that low gives Spotter Scout a gravitational self-righting profile with an inverted stability angle of just 1 to 2 degrees, so the vehicle has essentially no stable inverted orientation. In a breaking wave that flips it, Scout self-rights near-instantly. The battery's underwater placement also keeps it thermally moderated by the surrounding water, useful for a vehicle spending months in conditions that range from polar to tropical.
The propulsion system follows the same minimalist logic, with just two moving parts: the thruster and a rudder servo. It's engineered to eliminate the components most prone to wear or failure over long deployments, which is what lets it run reliably for months at sea without intervention.
Surviving heavy weather is one problem. Operating in it for months is another, and that's an energy problem. Spotter Scout's principle is straightforward: harvest more energy than you consume, and the vehicle runs indefinitely.
The solar array totals 340 W across panels that extend beyond the hull line to maximize capture area. The 2 kWh lithium-ion battery is UN 38.3 certified, with full battery management for condition monitoring throughout deployment.

In good sunlight, Scout operates indefinitely. In low-sun conditions, the energy budget supports more than six months of continuous operation. On battery alone, with no solar input at all, Scout draws roughly 10–20 W to station-keep depending on conditions, on the order of 130 hours, about five and a half days, before the battery is depleted. Heavier maneuvering shortens that further.
The biggest single contributor to Scout's endurance is how it station-keeps. Rather than holding position by constantly correcting against the motor, Scout uses a "lazy loiter": it drives to the center of its configured radius, shuts the motor off, and drifts while collecting data and solar charging. Only when it reaches the edge of the radius does it motor back toward the center. With station keeping radius configurable from 50 meters to 10 kilometers, the vehicle spends most of its time on station with the motor off.
When Scout does need to move, it cruises at 2 knots with a battery-only range of around 200 nautical miles. That's useful context for missions that involve longer transits between waypoints or a return-to-home recovery leg.
Months of operation also call for reliable connectivity. Spotter Scout is designed to stay in touch with operators across long deployments, with three independent satellite paths providing overlapping redundancy.
The primary telemetry link is Iridium, which sends position, battery status, and mission data back to the operator at configurable intervals, typically every 10 to 30 minutes. It's low power, operates globally, and is the workhorse for routine updates. Starlink provides a high-bandwidth link for real-time control, live video, and manual piloting. It's off by default to conserve power and turned on for launch, recovery, busy shipping lane crossings, or any moment the operator wants eyes-on visibility. Scout's core Spotter sensing module also maintains its own independent Iridium SBD connection, so it reports position and basic telemetry to the Spotter Dashboard regardless of what the vehicle's primary systems are doing. Scout also supports cellular connectivity where coverage is available, using the same options offered on Spotter buoys.
Because Spotter Scout is designed to execute its mission plan autonomously, hands-on operator involvement is light by default. For roughly 95% of mission time, the vehicle is running its plan on its own, and even in the unlikely event that all three connectivity paths went down at once, it would continue executing the mission until contact was re-established.
All of that infrastructure exists to support one thing: collecting ocean data. Spotter Scout carries the same core sensing module that powers Spotter buoys. It measures directional waves across a 0.03 to 0.8 Hz frequency range and barometric pressure with ±0.5 mbar accuracy. Wind speed and direction are also derived from the platform's motion and are currently in field validation. The data transmits to the Spotter Dashboard and API in the same format as a moored Spotter buoy, which means analytical workflows customers have built around buoy data work without modification on Scout data.
In co-located field testing against a moored Spotter buoy, Scout's wave measurements align with the buoy within Spotter's stated accuracy: approximately 0.1 m for significant wave height, 6° for mean direction, and 0.5 s for mean period.
For subsurface measurements, Scout includes a Bristlemouth payload bay. Subsurface sensors mount in the keel below the hull, with Bristlemouth connectivity routed down from the topside electronics. The same Bristlemouth sensors used on Smart Mooring deployments work here, so customers can use one collection of sensors across the entire Spotter platform. A given Scout carries one Bristlemouth payload at a time, drawn from the same catalog of payloads customers already use elsewhere.
An onboard HD camera rounds out the sensing package. It captures 1080p video at 30 fps, streams live via Starlink with around 2.5 seconds of latency, and supports time-lapse imagery and 30-second video clips. The camera is most useful during launch and recovery, but it also provides a visual record of conditions throughout a deployment.
At 2.5 meters, 80 kilograms, and a top speed of 3 knots, Spotter Scout poses minimal physical risk to others on the water. Even in the rare event of an encounter with a larger vessel, testing suggests Scout would be pushed aside by the oncoming bow wave rather than struck directly.
For collision avoidance, Scout receives AIS signals from nearby vessels and maintains a configurable avoidance radius, adjusting course when a broadcasting vessel enters that radius. The base configuration includes an AIS receiver. A Class B AIS transceiver can be added so Scout broadcasts its own position to other vessels, useful for operations near busy shipping areas. For deliberate shipping lane crossings, the workflow is to loiter at the edge of the lane, turn on Starlink for a live video feed, manually pilot across, and resume the autonomous mission on the other side.
Scout's size, weight, and speed put it in a category that most jurisdictions treat with light-touch oversight, particularly for operations beyond 12 nautical miles from shore. The platform is also designed to align with the IMO Maritime Autonomous Surface Ships (MASS) Code. For jurisdiction-specific requirements, talk to us.
Spotter Scout ships on a wheeled trolley and fits in a standard van. Launch is from a slipway into 1.5 meters of calm water, or from a vessel using a single-point lift from a boom, davit, or A-frame. It's been deployed from workboats, RIBs, and research vessels. No specialized launch infrastructure required.
Startup takes a few minutes. Pull the magnetic key to boot the vehicle, which appears online in Tether (the browser-based command and mission planning interface). Activate the core Spotter sensing module, and the vehicle is ready to deploy. From there, the operator pilots Scout away from the dock and sends it on its mission.

Service intervals run roughly every six months. The standard service replaces the thruster bearings and the rudder servo, jet washes the hull to remove biofouling, and reapplies antifoul coating. No advanced mechanical skill required. Biofouling is the primary practical limit on deployment duration, typically around six months in cold water before it needs attention, though Scout's frequent movement during loitering helps slow fouling compared to a static platform. Battery lifespan is estimated at around two years, with replacement determined by condition rather than a fixed schedule.
Spotter Scout isn't a USV with sensors strapped to it. The vehicle and the sensing platform were designed together. The keel that ballasts the battery also carries Bristlemouth connectivity for subsurface sensors. The flooded hull that makes the vehicle survivable also keeps the battery thermally moderated. The comms architecture keeps the core sensing module reporting home regardless of what else is happening. The result is a vehicle built for what ocean monitoring actually requires: long, unattended deployments that produce data worth acting on.
For more, see the Spotter Scout product page for deployment modes and use cases, and the Spotter Scout specs page for the complete technical specifications. Specifications are for the beta release and subject to change.





